作业描述
在之前的编程练习中实现了基础的光线追踪算法,具体而言是光线传输、光线与三角形求交。采用了这样的方法寻找光线与场景的交点:遍历场景中的所有物体,判断光线是否与它相交。在场景中的物体数量不大时,该做法可以取得良好的结果,但当物体数量增多、模型变得更加复杂,该做法将会变得非常低效。因此,需要加速结构来加速求交过程。在本次练习中,重点关注物体划分算法 Bounding Volume Hierarchy (BVH)。本练习要求实现 Ray-Bounding Volume 求交与 BVH 查找。
首先,需要从上一次编程练习中引用以下函数:
- Render() in Renderer.cpp: 将光线生成过程粘贴到此处,并且按照新框架更新相应调用的格式。
- Triangle::getIntersection in Triangle.hpp: 将光线-三角形相交函数粘贴到此处,并且按照新框架更新相应相交信息的格式。
在本次编程练习中,需要实现以下函数:
- IntersectP(const Ray& ray, const Vector3f& invDir, const std::array& dirIsNeg) in the Bounds3.hpp: 这个函数的作用是判断包围盒 BoundingBox 与光线是否相交,需要按照课程介绍的算法实现求交过程。
- getIntersection(BVHBuildNode node, const Ray ray)* in BVH.cpp: 建立 BVH 之后,我们可以用它加速求交过程。该过程递归进行,将在其中调用你实现的 Bounds3::IntersectP.
附加题:
- SAH 查找:自学 SAH(Surface Area Heuristic) , 正 确实现 SAH 加速,并对比 BVH、SVH 的时间开销。(可参考 http://15462.courses.cs.cmu.edu/fall2015/lecture/acceleration/slide_024,也可以查找其他资料)
解题思路
1 修改Render()函数
作业框架发生了一些改变,根据数据类型的变化做一些相应的调整。eyepos 的位置在(-1, 5, 10),屏幕的中心坐标就不在 (0,0,-1)了,而是位于 (-1,5,9)。但射线方向其实与作业5求法相同。
Vector3f dir = normalize(Vector3f(x, y, -1));
Ray ray = Ray(eye_pos, dir);
framebuffer[m++] = scene.castRay(ray, 0);
2 修改Triangle::getIntersection
上一次作业中函数判断光线是否与三角形相交并返回一个布尔值。此次作业中需要返回相交的信息。
inline Intersection Triangle::getIntersection(Ray ray)
{
Intersection inter;
// 点积大于零,两向量夹角小于90度,此时与光线和三角形不可能相交
if (dotProduct(ray.direction, normal) > 0)
return inter;
double u, v, t_tmp = 0;
Vector3f pvec = crossProduct(ray.direction, e2);
double det = dotProduct(e1, pvec);
if (fabs(det) < EPSILON)
return inter;
double det_inv = 1. / det;
Vector3f tvec = ray.origin - v0;
u = dotProduct(tvec, pvec) * det_inv;
if (u < 0 || u > 1)
return inter;
Vector3f qvec = crossProduct(tvec, e1);
v = dotProduct(ray.direction, qvec) * det_inv;
if (v < 0 || u + v > 1)
return inter;
t_tmp = dotProduct(e2, qvec) * det_inv;
// DONE: find ray triangle intersection
if (t_tmp < 0)
return inter;
inter.happened = true; // 是否相交
inter.coords = ray(t_tmp); // 交点坐标
inter.normal = normal; // 交点所在平面法线
inter.distance = t_tmp; // 光线出射时间
inter.obj = this; // 交点所在物体的物体类型
inter.m = m; // 三角形的材质
return inter;
}
3 实现IntersectP函数
这个函数的作用是判断包围盒 BoundingBox 与光线是否相交。
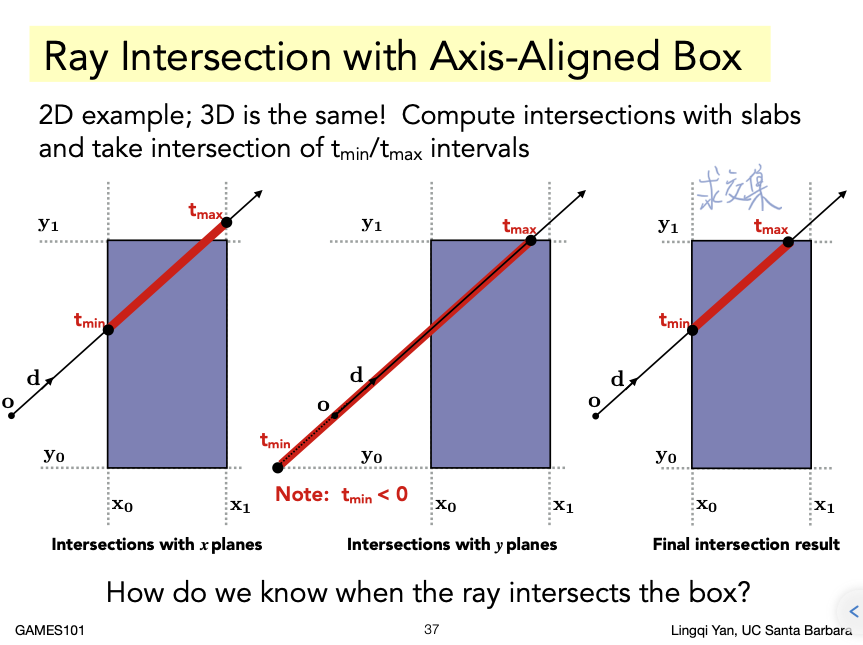
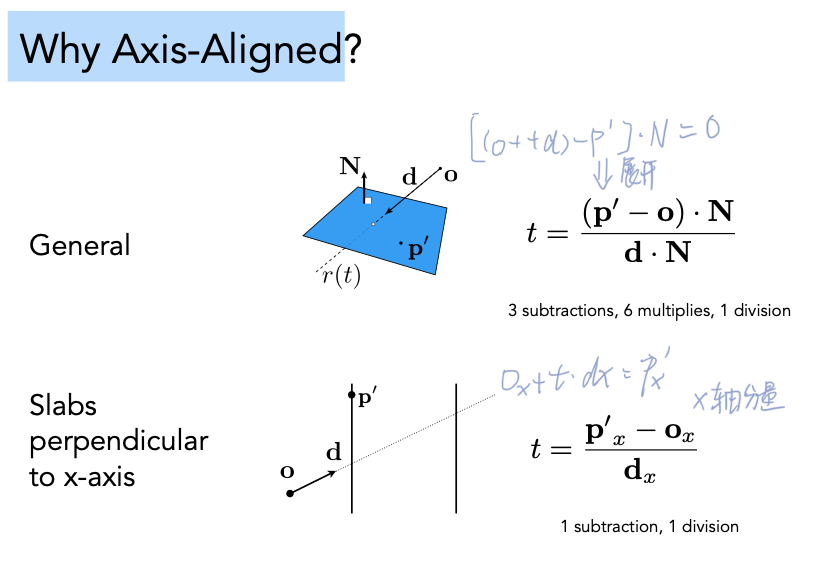
观察给出的Bounds3类,可知三维包围盒上是用两个点:三轴坐标最小点pMin和三轴坐标最大点pMax来表示,此时两个点刚好在包围盒的六个面上。结合射线的方程很容易能解出与每个面的交点。
class Bounds3
{
public:
Vector3f pMin, pMax; // two points to specify the bounding box
Bounds3()
{
double minNum = std::numeric_limits<double>::lowest();
double maxNum = std::numeric_limits<double>::max();
pMax = Vector3f(minNum, minNum, minNum);
pMin = Vector3f(maxNum, maxNum, maxNum);
}
Bounds3(const Vector3f p) : pMin(p), pMax(p) {}
Bounds3(const Vector3f p1, const Vector3f p2)
{
pMin = Vector3f(fmin(p1.x, p2.x), fmin(p1.y, p2.y), fmin(p1.z, p2.z));
pMax = Vector3f(fmax(p1.x, p2.x), fmax(p1.y, p2.y), fmax(p1.z, p2.z));
}
inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir,
const std::array<int, 3>& dirIsNeg) const {
// invDir: ray direction(x,y,z), invDir=(1.0/x,1.0/y,1.0/z), use this because Multiply is faster that Division
// dirIsNeg: ray direction(x,y,z), dirIsNeg=[int(x>0),int(y>0),int(z>0)], use this to simplify your logic
// Done: test if ray bound intersects
// 化简了一下运算,没有使用dirIsNeg,实际上和每条轴分别运算并判断方向的解法一样
Vector3f tMin = Vector3f::Min((pMin - ray.origin) * invDir, (pMax - ray.origin) * invDir);
Vector3f tMax = Vector3f::Max((pMin - ray.origin) * invDir, (pMax - ray.origin) * invDir);
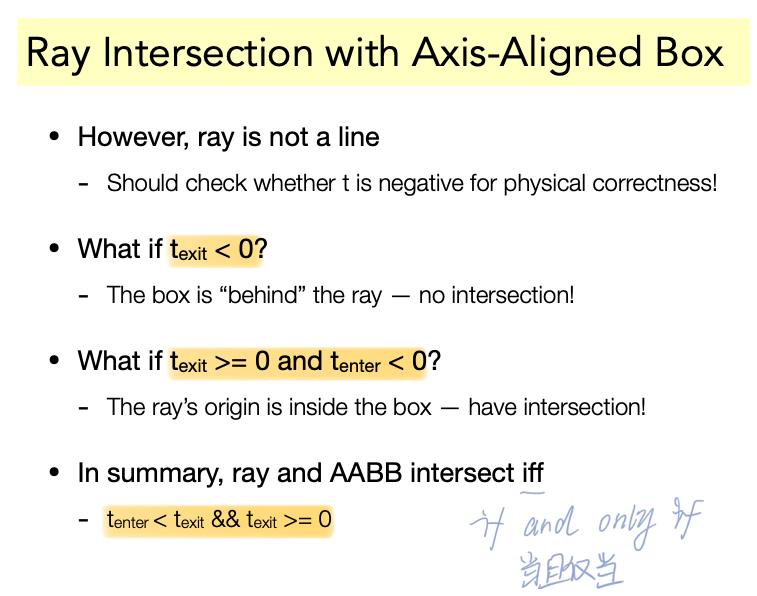
float tEnter = std::max(tMin.x, std::max(tMin.y, tMin.z));
float tExit = std::min(tMax.x, std::min(tMax.y, tMax.z));
return (tEnter < tExit) && (tExit >= 0);
}
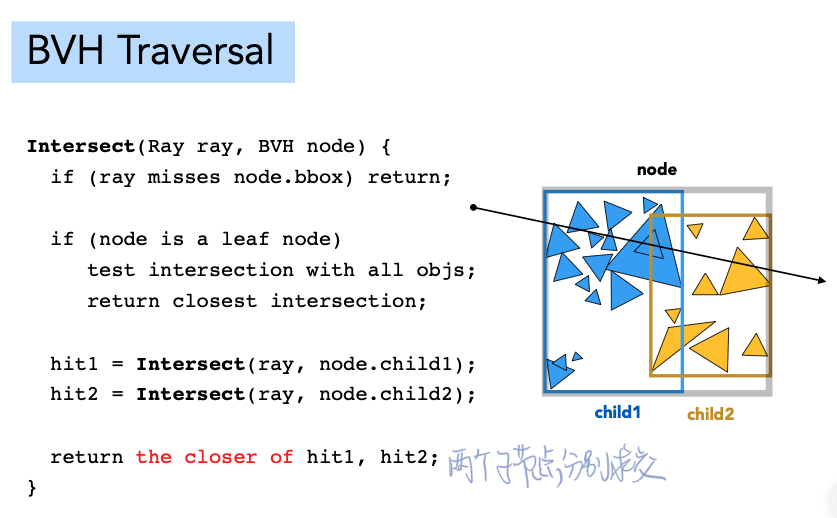
4 实现getIntersection
递归遍历二叉树。
Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const {
// DONE: Traverse the BVH to find intersection
Intersection isect;
// 没有交点
if (node == nullptr || !node->bounds.IntersectP(ray, ray.direction_inv, { 0,0,0 }))
return isect;
// 有交点且为叶子结点
if (node->left == nullptr && node->right == nullptr)
// 调用obj子类:Triangle的getIntersection,即到叶子节点的包围盒开始与三角形求交
return node->object->getIntersection(ray);
Intersection hit1 = getIntersection(node->left, ray);
Intersection hit2 = getIntersection(node->right, ray);
return hit1.distance < hit2.distance ? hit1 : hit2;
}
BVH Generation complete:
Time Taken: 0 hrs, 0 mins, 0 secs
- Generating BVH...
BVH Generation complete:
Time Taken: 0 hrs, 0 mins, 0 secs
Render complete: ======================================================] 100 %
Time taken: 0 hours
: 0 minutes
: 6 seconds
使用BVH加速算法渲染作业模型耗时6秒。
附加:SAH查找
BVH加速通常是选取三角形中位数位置分割子树,这种划分方式可以再优化。
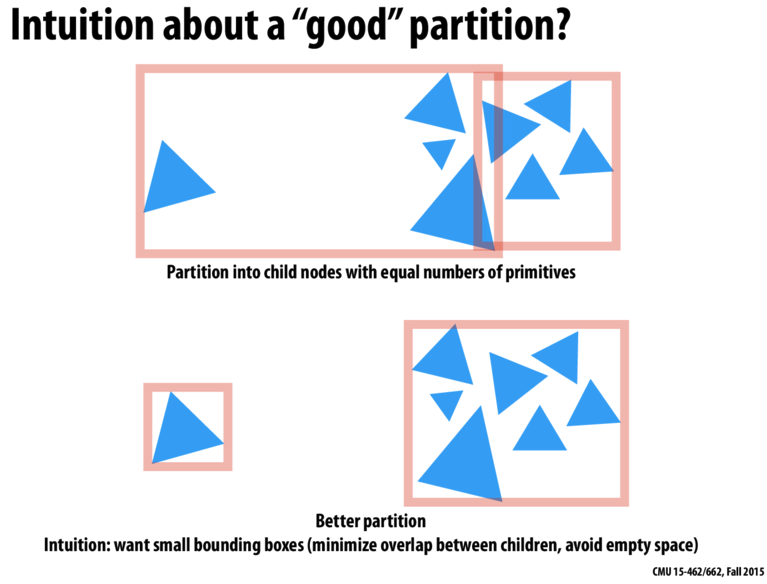
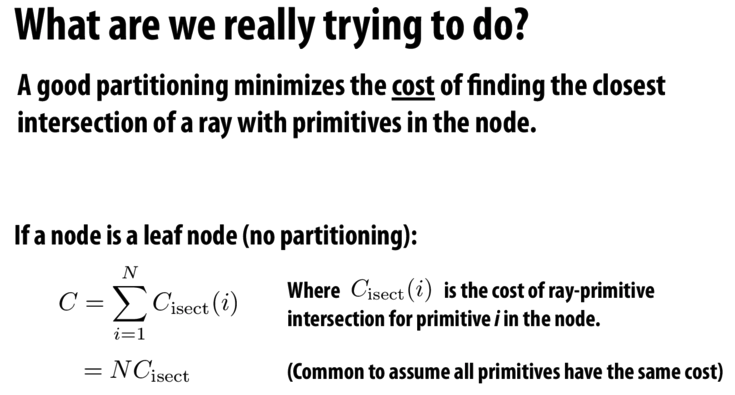
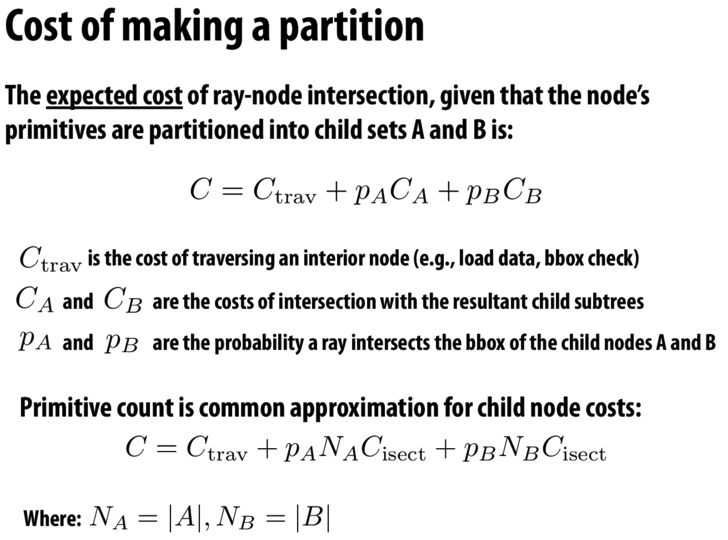
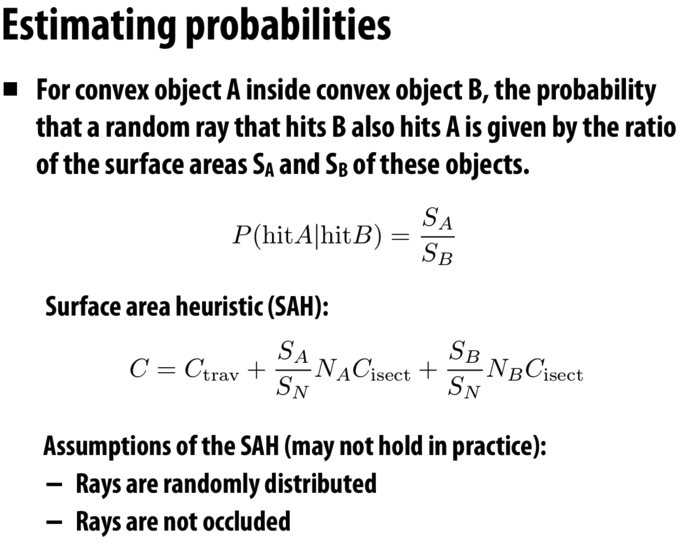
这里构建了一个评估函数计算节点的开销,优化的目标是划分空间时使这个式子的值最小。
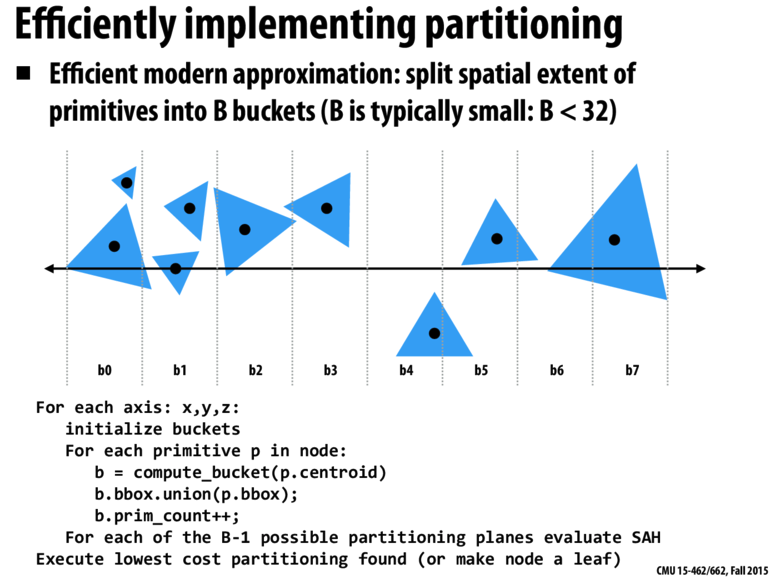
对于每个轴,将其等距离划分成B份,得到B-1个划分平面。对于第i个平面,把三角形的中点集合划分成两份,计算这两份的开销,选取开销最小的平面。
计算三个轴,选开销最小的轴。
可能是Stanford Bunny模型的面数太少,使用SAH加速后渲染时间与BVH无异,换了另一个面数更高的小牛的模型时间也还是一样。主要实现代码如下:
BVHAccel::BVHAccel(std::vector<Object*> p, int maxPrimsInNode,
SplitMethod splitMethod)
: maxPrimsInNode(std::min(255, maxPrimsInNode)), splitMethod(splitMethod),
primitives(std::move(p)) {
time_t start, stop;
time(&start);
if (primitives.empty())
return;
if (splitMethod == SplitMethod::NAIVE) {
root = root = recursiveBuild(primitives);
}
else if (splitMethod == SplitMethod::SAH) {
root = root = recursiveSAHBuild(primitives);
}
time(&stop);
double diff = difftime(stop, start);
int hrs = (int)diff / 3600;
int mins = ((int)diff / 60) - (hrs * 60);
int secs = (int)diff - (hrs * 3600) - (mins * 60);
printf(
"\rBVH Generation complete: \nTime Taken: %i hrs, %i mins, %i secs\n\n",
hrs, mins, secs);
}
BVHBuildNode* BVHAccel::recursiveSAHBuild(std::vector<Object*> objects) {
BVHBuildNode* node = new BVHBuildNode();
// Compute bounds of all primitives in BVH node
Bounds3 bounds;
for (int i = 0; i < objects.size(); ++i)
bounds = Union(bounds, objects[i]->getBounds());
// 剩下一个,直接设为叶子结点
if (objects.size() == 1) {
// Create leaf _BVHBuildNode_
node->bounds = objects[0]->getBounds();
node->object = objects[0];
node->left = nullptr;
node->right = nullptr;
return node;
}
// 剩下两个,左子树一个右子树一个
else if (objects.size() == 2) {
node->left = recursiveBuild(std::vector{ objects[0] });
node->right = recursiveBuild(std::vector{ objects[1] });
node->bounds = Union(node->left->bounds, node->right->bounds);
return node;
}
else {
Bounds3 centroidBounds;
// 求整体包围盒
for (int i = 0; i < objects.size(); ++i)
centroidBounds =
Union(centroidBounds, objects[i]->getBounds().Centroid());
// SAH相关参数
float Sn = centroidBounds.SurfaceArea();
int B = 10; // B is typically small than 32
int minCostCoor = 0; // 最优分割轴
int minCostIndex = 0; // 最优分割区块值
float minCost = std::numeric_limits<float>::infinity(); // 最小开销
// 分别计算三个轴
for (int i = 0; i < 3; ++i) {
switch (i) {
case 0:
// 对x排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().x < f2->getBounds().Centroid().x;});
break;
case 1:
// 对y排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().y < f2->getBounds().Centroid().y;});
break;
case 2:
// 对z排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().z < f2->getBounds().Centroid().z;});
break;
default:
break;
}
for (int j = 1; j < B; ++j) {
auto beginning = objects.begin();
auto middling = objects.begin() + (objects.size() * j / B);
auto ending = objects.end();
auto leftShapes = std::vector<Object*>(beginning, middling);
auto rightShapes = std::vector<Object*>(middling, ending);
Bounds3 leftBounds, rightBounds;
for (int k = 0; k < leftShapes.size(); ++k)
leftBounds =
Union(leftBounds, leftShapes[k]->getBounds().Centroid());
for (int k = 0; k < rightShapes.size(); ++k)
rightBounds =
Union(rightBounds, rightShapes[k]->getBounds().Centroid());
float SA = leftBounds.SurfaceArea();
float SB = rightBounds.SurfaceArea();
float cost = 1 + (leftShapes.size() * SA + rightShapes.size() * SB) / Sn;
if (cost < minCost) {
minCost = cost;
minCostIndex = j;
minCostCoor = i;
}
}
}
switch (minCostCoor) {
case 0:
// x轴最长,对x排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().x < f2->getBounds().Centroid().x;});
break;
case 1:
// y轴最长,对y排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().y < f2->getBounds().Centroid().y;});
break;
case 2:
// z轴最长,对z排序
std::sort(objects.begin(), objects.end(), [](auto f1, auto f2) {return f1->getBounds().Centroid().z < f2->getBounds().Centroid().z;});
break;
default:
break;
}
auto beginning = objects.begin();
auto middling = objects.begin() + (objects.size() * minCostIndex / B);
auto ending = objects.end();
auto leftShapes = std::vector<Object*>(beginning, middling);
auto rightShapes = std::vector<Object*>(middling, ending);
assert(objects.size() == (leftShapes.size() + rightShapes.size()));
node->left = recursiveSAHBuild(leftShapes);
node->right = recursiveSAHBuild(rightShapes);
node->bounds = Union(node->left->bounds, node->right->bounds);
}
return node;
}
